全自动起重永磁铁的结构设计
笔者在前文中已经论述了全自动起重永磁铁研发的背景技术,在本文中,笔者将以全自动起重永磁铁的结构设计为主题展开论述。 全自动起重永磁铁主要由起吊部分与控制部分组成。起吊部分是由1组杆组成的纯机械装置;控制部分是由电源、遥控接收、电路板等装置组成。其工作原理如下所述: 结构组成:起吊部分由磁芯、磁力吸盘和起吊杆三大部分组成。该部分也是完成自动取物的技术关键点。其运动如下
笔者在前文中已经论述了全自动起重永磁铁研发的背景技术,在本文中,笔者将以全自动起重永磁铁的结构设计为主题展开论述。
全自动起重永磁铁主要由起吊部分与控制部分组成。起吊部分是由1组杆组成的纯机械装置;控制部分是由电源、遥控接收、电路板等装置组成。其工作原理如下所述:
结构组成:起吊部分由磁芯、磁力吸盘和起吊杆三大部分组成。该部分也是完成自动取物的技术关键点。其运动如下:
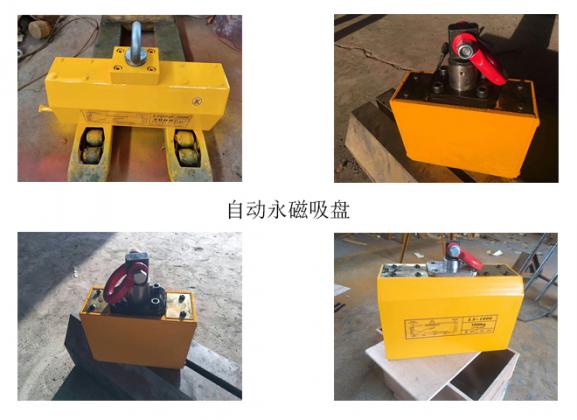
根据永磁吸盘的结构原理,设计的磁芯和磁力吸盘结构原理如下:
结构:磁芯由磁钢和隔磁材料相间组成,装在隔磁材料的磁箱中,磁箱表而固定1磁箱推脚,磁力吸盘由Q235和隔磁材料相间组成,并与外壳固定为一体,外壳为隔磁材料。
原理:通过磁芯与磁力吸盘的相对移动,使得磁路呈开通(负载)及短接(卸载)2种状态。
控制部分:该部分由电机驱动板、无线接收处理电路、电机和电源4大部分组成。其原理如下:
由无线接收处理电路,接收遥控发射的编码信号,对其解码,从而识别出控制对象。电机驱动采用大电流继电器驱动,并在驱动的同时实现2台电机的正反转电气互锁。起吊电机和移动电机均可正反转,通过电机旋转与机械部分配合实现起吊和移动动作。